


信号与系统学习笔记(二)
主要介绍连续时间系统的时域分析
之后主要讨论的都是线性时不变系统 ( LTI )
微分方程的建立和求解
建立系统模型主要有两种方法:
- 通过输入输出建立(一元 n 阶)
- 通过内部状态变量建立(n 元一阶)
我们主要讨论输入输出描述。
一个线性系统,其激励信号 $e(t)$ 和响应信号 $r(t)$ 之间的关系,可以用下列形式的微分方程来描述
$$
C_0\frac{\mathrm d^n r(t)}{\mathrm dt^n}+C_1\frac{\mathrm d^{n-1} r(t)}{\mathrm dt^{n-1}}+\cdots +C_{n-1}\frac{\mathrm dr(t)}{\mathrm dt}+C_nr(t)=E_0\frac{\mathrm d^m e(t)}{\mathrm dt^m}+E_1\frac{\mathrm d^{m-1} e(t)}{\mathrm dt^{m-1}}+\cdots +E_{m-1}\frac{\mathrm de(t)}{\mathrm dt}+E_me(t)
$$
若系统时不变,则系数 $C_i,E_i$ 为常数,方程为 $n$ 阶线性常微分方程。
阶次由独立的动态元件的个数决定。
经典法
写出微分方程,转换为齐次方程,写出特征方程,求出特征根,写出齐次解。
$$
C_0\frac{\mathrm d^n r(t)}{\mathrm dt^n}+C_1\frac{\mathrm d^{n-1} r(t)}{\mathrm dt^{n-1}}+\cdots +C_{n-1}\frac{\mathrm dr(t)}{\mathrm dt}+C_nr(t)=E_0\frac{\mathrm d^m e(t)}{\mathrm dt^m}+E_1\frac{\mathrm d^{m-1} e(t)}{\mathrm dt^{m-1}}+\cdots +E_{m-1}\frac{\mathrm de(t)}{\mathrm dt}+E_me(t)\\
C_0\frac{\mathrm d^n r(t)}{\mathrm dt^n}+C_1\frac{\mathrm d^{n-1} r(t)}{\mathrm dt^{n-1}}+\cdots +C_{n-1}\frac{\mathrm dr(t)}{\mathrm dt}+C_nr(t)=0\\
C_0a^n+C_1a^{n-1}+\cdots+C_{n-1}a+C_n=0\\
r_h(t)=\sum_{k=1}^nA_ke^{a_kt} \qquad(无重根)\\
$$
若有重根,重根的相关 $k$ 项改写为
$$
(\sum_{i=1}^kA_it^{k-i})e^{at}
$$
求出齐次解后再求特解,根据微分方程右端的函数形式,设含待定系数的特解代数式,代入原方程求出特解。
几种激励函数相应的特解
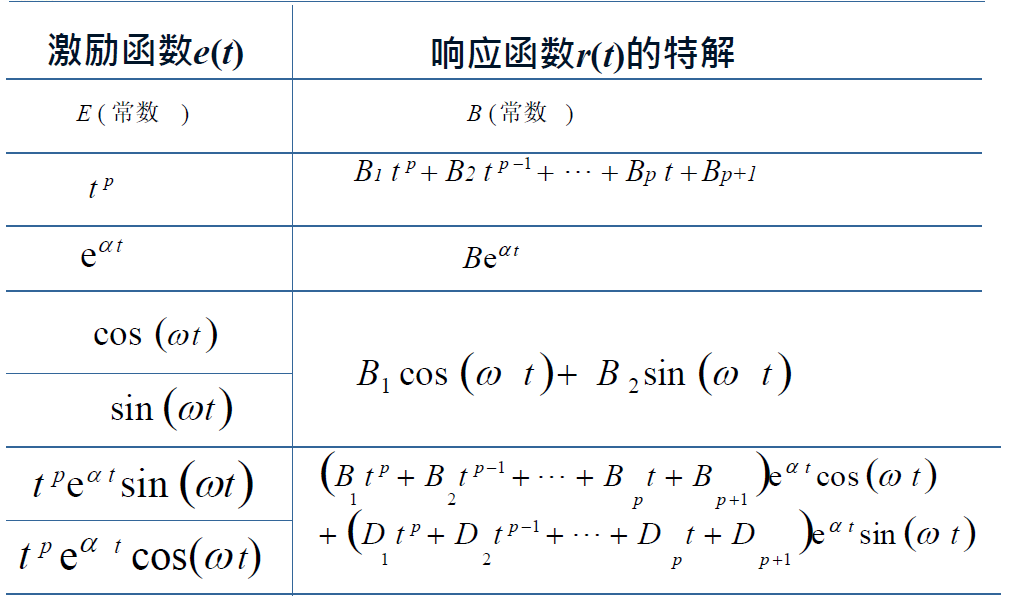
得到特解后,全解即为齐次解+特解,再由初值条件解出齐次解系数得到全解
$$
r(t)=\sum_{i=1}^nA_ie^{a_it}+r_p(t)
$$
一般将激励加入的时间定义为 $t=0$ ,响应为 $t\geqslant0_+$ 时的方程的解,初始条件为 $t=0_+$ 时响应和其各阶导数的值(我好像之前没讲初始条件和起始条件)
e.g.
已知微分方程为
$$
r”(t)+6r'(t)+8r(t)=e(t),t>0
$$
初始条件 $r(0)=1,r'(0)=2$ ,激励 $e(t)=e^{-t}u(t)$ ,求响应 $r(t)$
解:
特征方程
$$
a^2+6a+8=0\\
a_1=-2,a_2=-4\\
r_h(t)=A_1e^{-2t}+A_2e^{-4t}\\
r_p(t)=Be^{-t}\Rightarrow (B-6B+8B)e^{-t}=e^{-t}\\
r_p(t)=\frac{1}{3}e^{-t}\\
r(t)=A_1e^{-2t}+A_2e^{-4t}+\frac{1}{3}e^{-t}\\
\begin{cases}
r(0)=A_1+A_2+\displaystyle{\frac{1}{3}}=1\\
r'(0)=-2A_1-4A_2-\displaystyle{\frac{1}{3}}=2
\end{cases}\\
\begin{cases}
A_1=\displaystyle{\frac{5}{2}}\\
A_2=-\displaystyle{\frac{11}{6}}
\end{cases}\\
r(t)=(\frac{5}{2}e^{-2t}-\frac{11}{6}e^{-4t}+\frac{1}{3}e^{-t})u(t)
$$
一般在解出来的结果后乘 $u(t)$ 或标注 $t>0$ 表示作用范围
但经典法存在局限:
- 激励项复杂则无法求解
- 激励信号变化则系数需要重新求解
- 初始条件发生变化也需要重新求解
- 初始条件难以求得
所以我们绕开初始状态跳变的问题
起始点的跳变
若有冲激电流作用于电容或冲激电压作用于电感,则电容两段电压或流过电感电流会发生跳变,$0_-$ 到 $0_+$ 状态就会发生跳变。
若用微分方程表示,即是否跳变取决于方程右端自由项是否有 $\delta(t)$ 及其各阶导数。
电容电压跳变
$$
v_C(0_+)=v_C(0_-)+\int_{0_-}^{0_+}\frac{i_C\mathrm dt}{C}\\
$$
若 $i_C=\delta(t)$ ,
$$
v_C(0+)=v_C(0-)+\frac{1}{C}
$$
电感电流跳变
同理
$$
i_L(0_+)=i_L(0_-)+\frac{1}{L}\int_{0_-}^{0+}v_L\mathrm dt
$$
若 $v_L=\delta(t)$ ,
$$
i_L(0+)=i_L(0_-)+\frac{1}{L}
$$
冲激函数匹配法
若方程为
$$
r'(t)+3r(t)=3\delta'(t)
$$
右端最高阶为 $\delta'(t)$ ,左边最高阶为 $r'(t)$ ,显然 $r'(t)$ 包含 $3\delta'(t)$ ,即 $r(t)$ 包含 $3\delta(t)$
为了平衡 $3r(t)$ 中的 $9\delta(t)$ ,$ r'(t)$ 中需要包含 $-9\delta(t)$ 的项,即 $r(t)$ 需要包含 $-9\Delta u(t)$
这里的 $\Delta u(t)$ 指的是从 $0_-$ 到 $0_+$ 的跳变量,不是阶跃函数。
因此 $r(0_+)=r(0_-)-9$
此外,也可以用待定系数法
右端最高阶为 $\delta'(t)$ ,左边最高阶为 $r'(t)$ ($t=0$ 附近)
$$
\begin{cases}
r'(t)=a\delta'(t)+b\delta(t)+c\Delta u(t)\\
r(t)=a\delta(t)+b\Delta u(t)
\end{cases}\\
a\delta'(t)+(b+3a)\delta(t)+(c+3b)\Delta u(t)=3\delta'(t)\\
\begin{cases}
a=3\\
b=-9
\end{cases}\\
r(0_+)=r(0_-)-9
$$
总结:
- 只匹配冲激函数及其各阶导数项
- 从左端最高项着手
- 低阶项不能匹配的部分由高阶项补偿
- 匹配好的高阶项不变
零输入响应和零状态响应
一定条件下,激励源与起始状态($0_-$ 即储能)可以等效转换,即将原始储能看为激励源。
由于线性叠加性,系统的完全响应 = 零输入响应 (起始状态等效激励源) + 零状态响应 (外加激励源)
如上面提到的电容,可以看作起始状态为 0 的电容器与 $e(t)=v_C(0_-)u(t)$ 的直流电压源串联。
响应划分
- 自由响应和强迫响应
- 暂态响应和稳态响应
- 零输入响应和零状态响应
自由响应又称固有响应,由系统特性决定与激励无关,对应齐次解。
强迫响应由激励决定,对应特解。
暂态响应和稳态响应不讲了,可以自行了解。
零输入响应:没有外加激励信号的作用,只由起始状态所产生的响应,反应系统历史信息。
零状态响应:不考虑原始储能作用,由外加激励信号产生的响应。
零输入响应
零输入响应满足
$$
C_0\frac{\mathrm d^n r(t)}{\mathrm dt^n}+C_1\frac{\mathrm d^{n-1} r(t)}{\mathrm dt^{n-1}}+\cdots +C_{n-1}\frac{\mathrm dr(t)}{\mathrm dt}+C_nr(t)=0\\
r^{k}(0_-)已知
$$
即能由起始条件解出对应的齐次解
e.g.1
$$
r”(t)+6r'(t)+8r(t)=e(t)\\
r(0_-)=1,r'(0_-)=2
$$
求系统零输入响应 $r_{zi}(t)$
解
$$
a^2+6a+8=0\\
a_1=-2,a_2=-4\\
r_{zi}(t)=A_1e^{-2t}+A_2e^{-4t}\\
\begin{cases}
A_1+A_2=1\\
-2A_1-4A_2=2
\end{cases}\\
\Rightarrow
\begin{cases}
A_1=3\\
A_2=-2
\end{cases}\\
r_{zi}(t)=(3e^{-2t}-2e^{-4t}),t\geqslant0_-
$$
e.g.2
$$
r”(t)+2r'(t)+5r(t)=e(t)\\
r(0_-)=1,r'(0_-)=3
$$
求系统零输入响应 $r_{zi}(t)$
解
$$
a_1=-1+2j,a_2=-1-2j\\
r_{zi}(t)=e^{-t}(A_1\cos(2t)+A_2\sin(2t))\\
\begin{cases}
A_1=1\\
-A_1+2A_2=3
\end{cases}\\
\Rightarrow
\begin{cases}
A_1=1\\
A_2=2
\end{cases}\\
r_{zi}(t)=e^{-t}(\cos(2t)+2\sin(2t)),t\geqslant0_-
$$
零状态响应
零状态响应,即在激励作用下求解系统方程的非齐次解,由起始状态为 0 求得待定系数
满足
$$
C_0\frac{\mathrm d^n r(t)}{\mathrm dt^n}+C_1\frac{\mathrm d^{n-1} r(t)}{\mathrm dt^{n-1}}+\cdots +C_{n-1}\frac{\mathrm dr(t)}{\mathrm dt}+C_nr(t)=E_0\frac{\mathrm d^m e(t)}{\mathrm dt^m}+E_1\frac{\mathrm d^{m-1} e(t)}{\mathrm dt^{m-1}}+\cdots +E_{m-1}\frac{\mathrm de(t)}{\mathrm dt}+E_me(t)\\
r_{zs}(t)=\sum_{k=1}^nA_{zsk}e^{a_kt}+B(t)
$$
可与自由响应和强迫响应对比
$$
r(t)=\sum_{k=1}^nA_ke^{a_kt}(\text{自由响应})+B(t)(强迫响应)\\
r(t)=\sum_{k=1}^nA_{zik}e^{a_kt}(零输入响应)+\sum_{k=1}^nA_{zsk}e^{a_kt}+B(t)(零状态响应)
$$
e.g.
$$
r'(t)+3r(t)=3e(t)\\
e(t)=u(t)\\
r(0_-)=\frac{3}{2}
$$
求自由响应,强迫响应,零输入响应,零状态响应,完全响应
解
$$
a=-3\\
r_h(t)=Ae^{-3t}\\
r_p(t)=B\\
3B=3\\
r_p(t)=1\\
r(t)=Ae^{-3t}+1\\
A+1=\frac{3}{2}(无跳变)\\
r(t)=\frac{3}{2}e^{-3t}+1\\
r_{zi}(t)=\frac{3}{2}e^{-3t}\\
令\ r(0_+)=0,r_{zs}(t)=B_1e^{-3t}+1\\
B_1=-1\\
r_{zs}=-e^{-3t}+1
$$
注意标注响应作用范围,我这里没标
比较无语的是零状态响应仍要得到特解
冲激响应和阶跃响应
冲激响应
系统在单位冲激信号 $\delta(t)$ 作用下产生的零状态响应,称为系统的单位冲激响应,简称冲激响应,一般用 $h(t)$ 表示。
$$
C_0\frac{\mathrm d^n r(t)}{\mathrm dt^n}+C_1\frac{\mathrm d^{n-1} r(t)}{\mathrm dt^{n-1}}+\cdots +C_{n-1}\frac{\mathrm dr(t)}{\mathrm dt}+C_nr(t)=E_0\frac{\mathrm d^m e(t)}{\mathrm dt^m}+E_1\frac{\mathrm d^{m-1} e(t)}{\mathrm dt^{m-1}}+\cdots +E_{m-1}\frac{\mathrm de(t)}{\mathrm dt}+E_me(t)
$$
令 $e(t)=\delta(t)$ ,则 $r(t)=h(t)$
由于 $t>0$ 时,$\delta(t)$ 及各阶导数为 0 ,故右端自由项恒为 0,冲激响应形式与齐次解相同。
同时与 $n,m$ 大小有关,
- $n>m$ ,$h(t)$ 不含 $\delta(t)$ 及其各阶导数
- $n=m$,$h(t)$ 包含 $\delta(t)$
- $n
阶跃响应
系统在单位阶跃信号 $ u(t)$ 作用下产生的零状态响应,称为系统的单位阶跃响应,简称阶跃响应,一般用 $g(t)$ 表示。
可以利用线性时不变系统的微分特性,通过 $h(t)$ 求解 $g(t)$ .
$$
g(t)=\int_{-\infty}^th(t)\mathrm d\tau
$$
e.g.1
$$
r'(t)+3r(t)=2e(t),t>0
$$
求 $h(t)$
解
$$
h(t)=Ae^{-3t}u(t)\\
(Ae^{-3t}u(t))’+3Ae^{-3t}u(t)=2\delta(t)\\
Ae^{-3t}\delta(t)+(-3A+3A)e^{-3t}u(t)=2\delta(t)\\
A=2\\
h(t)=2e^{-3t}u(t)
$$
e.g.2
$$
r'(t)+3r(t)=e'(t)+2e(t),t>0
$$
求 $h(t)$
解
由于冲激函数配平, $h(t)$ 的形式需要加上 $\delta(t)$ 项
$$
h(t)=Ae^{-3t}u(t)+B\delta(t)\\
(Ae^{-3t}u(t)+B\delta(t))’+3(Ae^{-3t}u(t)+B\delta(t))=\delta'(t)+2\delta(t)\\
B\delta'(t)+(Ae^{-3t}+3B)\delta(t)=\delta'(t)+2\delta(t)\\
\begin{cases}
B=1\\
A+3B=2
\end{cases}\\
\Rightarrow
\begin{cases}
A=-1\\
B=1
\end{cases}\\
h(t)=-e^{-3t}u(t)+\delta(t)
$$
牛刀小试
有一系统对激励为 $e_1(t)=u(t)$ 时的完全响应为 $r_1(t)=2e^{-t}u(t)$,对激励为 $e_2(t)=\delta(t)$ 时的完全响应为 $r_2(t)=\delta(t)$
求该系统的零输入响应


No Comments