


电子电路与系统基础笔记(6)——瞬态与稳态
稳态与瞬态
电路所处理的信号都可以傅立叶分解为正弦信号的叠加形式或积分形式,因而理论上线性时不变电路系统分析,均可做正弦激励下的稳态分析。
根据叠加定理,真实信号的响应是构成真实信号正弦波信号分响应之和(或积分),因此正弦激励下的稳态响应分析(相量法分析)是本节课要点内容有稳态响应,就是瞬态响应。
本节将把稳态与瞬态概念推广到任意信号激励情况。
三角函数运算规则回顾
和角差角,积化和差等。
两个同频正弦波叠加
$$
A \cos \omega t + B \sin \omega t \\
= \sqrt{A^2 + B^2} \left ( \cos \omega t – \varphi \right ) \\
\varphi =
\begin{cases}
\arctan \dfrac{B}{A} & A > 0 \\
\arctan \dfrac{B}{A} + \pi & A < 0
\end{cases}
$$
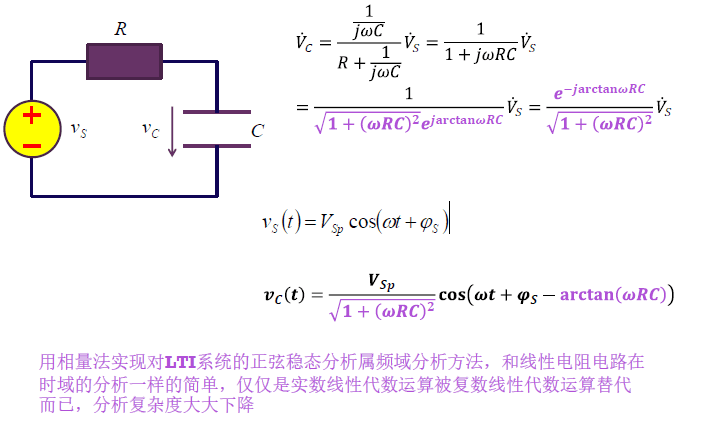
RC 分压:$t = -\infty$ 时加载正弦激励
由于单频正弦信号是在 $t = -\infty$ 时加载的,因而不存在电容初始电压问题:即使电容有初始电压,根据叠加定理,该初始电压导致的分响应(电容放电指数衰减函数)也已经衰减为0了,因而 $t = -\infty$ 加载信号分析时,均不考虑电容初值问题,只考虑外加激励导致的响应:$t = -\infty$ 加载信号的分析,均属稳态分析。
分析
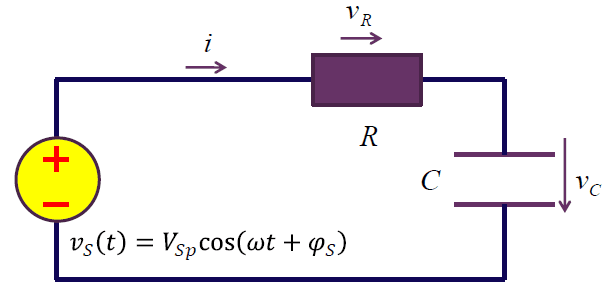
$$
v_S(t) = v_R(t) + v_C(t) \\
= i_R(t) R + v_C(t) \\
= i_C(t) R + v_C(t) \\
= RC \frac{\mathrm{d}}{\mathrm{d} t} v_C(t) + v_C(t) \\
v_S(t) = V_{Sp} \cos (\omega t + \varphi_S)
$$
线性时不变电路不会产生新的频率分量,故而正弦激励的稳态响应只能是同频正弦信号:
$$
v_C(t) = V_{Cp} \cos (\omega t + \varphi_C)
$$
可以利用三角函数运算求解:
$$
-RC V_{Cp} \omega \sin (\omega t + \varphi_C) V_{Cp} \cos (\omega t + \varphi_C) = V_{Sp} \cos (\omega t + \varphi_S) \\
\cos (\omega t + \varphi_C + \varphi) = \frac{V_{Sp}}{V_{Cp} \sqrt{1 + (\omega RC)^2}} \cos (\omega t + \varphi_S)
$$
其中 $\varphi = \arctan(\omega RC)$。
因此:
$$
V_{Cp} = \frac{V_{Sp}}{\sqrt{1 + (\omega RC)^2}} \\
\varphi_C = \varphi_S – \varphi \\
v_C(t) = \frac{V_{Sp}}{\sqrt{1 + (\omega RC)^2}}\cos (\omega t + \varphi_S – \arctan(\omega RC))
$$
上述三角函数分析对一阶电路是可以接受的,但是对于高阶电路,三角函数运算将会很容易出错:LTI 电路系统的正弦稳态分析,一般采用相量法进行分析。
旋转矢量表示
$$
\varphi(t) = \omega t + \varphi_0 \\
s(t) = x(t) + \mathrm{j} y(t) \\
= A_p e^{\mathrm{j}(\omega t + \varphi_0)} \\
x(t) = \Re s(t) = A_p \cos (\omega t +\varphi_0) \\
y(t) = \Im s(t) = A_p \sin (\omega t + \varphi_0)
$$
用旋转矢量表述:
$$
\frac{\mathrm{d} s(t)}{\mathrm{d} t} = \mathrm{j} \omega \cdot s(t) = \omega A_p e^{\displaystyle \mathrm{j} \left( \omega t + \varphi_0 + \frac{\pi}{2} \right )}
$$
$$
\Re \frac{\mathrm{d} s(t)}{\mathrm{d} t} = \frac{\mathrm{d} x(t)}{\mathrm{d} t} \\
\frac{\mathrm{d} s}{\mathrm{d} t} = \frac{\mathrm{d} x}{\mathrm{d} t} + \mathrm{j} \frac{\mathrm{d} y}{\mathrm{d} t}
$$
微分运算是线性算子。
同理积分运算可以被转化为除法运算。
$$
\int_{-\infty}^t s(t) \mathrm{d} t = \frac{A_p}{\omega} e^{\displaystyle \mathrm{j} \left (\omega t + \varphi_0 – \frac{\pi}{2} \right )} \\
\int_{-\infty}^t s(t) \mathrm{d} t = \int_{-\infty}^t x(t) \mathrm{d} t + \mathrm{j} \int_{-\infty}^t y(t) \mathrm{d} t
$$
相量引入
线性时不变电路在正弦激励下进入稳态后,电路中只有一个单频分量,所有支路电压、支路电流都是单频正弦波,仅仅是该正弦波的幅度相位需要确定,因而只需关注正弦波的幅度相位即可,幅度相位表述的复数就是相量。
在确定频率下,一个相量对应一个正弦波。
$$
i(t) = I_p \cos (\omega t + \varphi_I) \\
\overrightarrow{i(t)} = (I_p e^{\mathrm{j} \varphi_I}) e^{\mathrm{j} \omega t} \\
\overset{\cdot}{I} = I_p e^{\mathrm{j} \varphi_1} \angle \varphi_1
$$
对于电压同理。
用旋转矢量替代正弦信号
$$
\mathrm{j} \Omega RC \overset{\cdot}{V_C} + \overset{\cdot}{V_C} = \overset{\cdot}{V_S} \\
\Rightarrow \left [\sqrt{1 + (\omega \tau)^2} \angle \arctan \omega \tau \right ] \cdot V_{Cp} \angle \varphi_C = V_{Sp} \angle \varphi_S
$$
因此即可得到 $V_{Cp}$ 与 $\varphi_C$。
电容、电感的相量法表述
实际电路分析时,我们更喜欢用电路概念解题,如分压、分流、等效电阻等,而不是每次都通过列方程求解。
- 列方程求解属于第一次碰到的电路问题,你还不了解它,不得不通过“列方程、解方程、对解进行解析获得电路功能”这个完整的电路分析过程理解该电路。
- 对于简单结构、熟悉结构,多采用电路概念分析,因此需要在相量域直接用乘除 $\mathrm{j} \omega$ 表述电容、电感元件约束中的时域微分,之后就可以用简单的分压分流概念进行求解了。
电导、电纳的电压电流向量关系

也就是导纳分别为实部和虚部。
RC 并联导纳
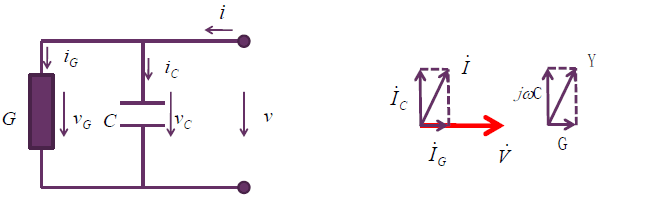
$$
i = i_G + i_C, \overset{\cdot}{I} = \overset{\cdot}{I}_G + \overset{\cdot}{I}_C \\
\overset{\cdot}{I} = \overset{\cdot}{I}_G + \overset{\cdot}{I}_G = Y \overset{\cdot}{V} \\
Y = \frac{\overset{\cdot}{I}}{\overset{\cdot}{V}} = \frac{I_p}{V_p} \angle (\varphi_I – \varphi_V) \\
Y = G + \mathrm{j} \omega C \\
= G + \mathrm{j} + B \\
= \sqrt{G^2 + (\omega C)^2} \angle \arctan \frac{\omega C}{G}
$$
电阻、电抗的电压电流向量关系
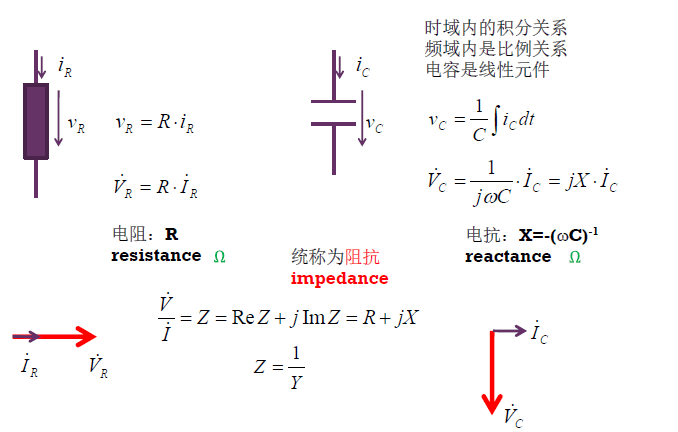
RC 串联阻抗
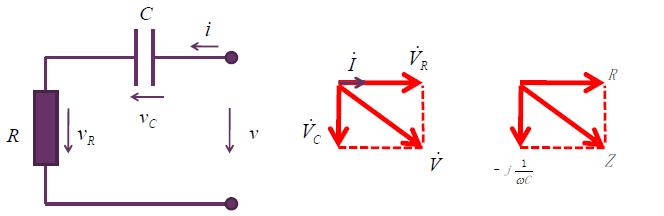
$$
v = v_R + v_C \\
Z = R + \frac{1}{\mathrm{j} \omega C} \\
= R + \frac{1}{\mathrm{j} \omega C} = R + \mathrm{j} X \\
= \sqrt{R^2 + \left (\frac{1}{\omega C} \right)^2} \angle – \arctan \frac{1}{\omega RC}
$$
电感是电容的对偶元件
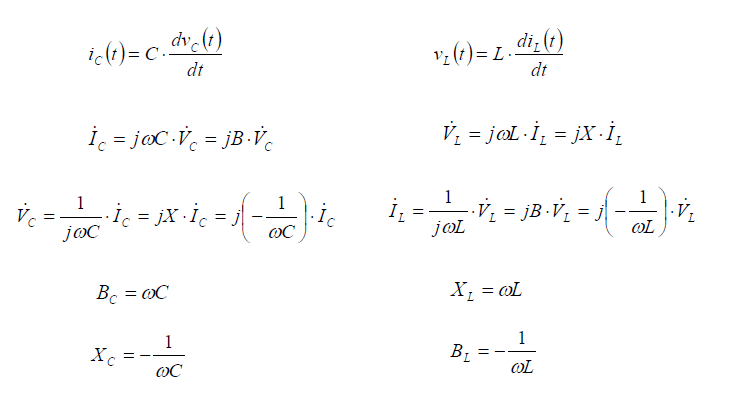
基尔霍夫定律和广义欧姆定律
$$
\overset{\cdot}{V} = R \overset{\cdot}{I} \\
\overset{\cdot}{C} = \frac{1}{\mathrm{j} \omega C} \overset{\cdot} I \\
\overset{\cdot}{I}_G = G \overset{\cdot}{V} \\
\overset{\cdot}{I}_C = \mathrm{j} \omega C \overset{\cdot}{V}
$$
阻抗串并联
串联:
$$
\overset{\cdot}{V} = \sum_{k = 1}^N \overset{\cdot}{V}_k = \sum_{k = 1}^N Z_k \overset{\cdot}{I} = Z \overset{\cdot}{I} \\
Z = \sum_{i = 1}^N Z_k
$$
并联:
$$
\overset{\cdot}{I} = \sum_{k = 1}^N \overset{\cdot}{I}_k = \sum_{k = 1}^N Y_k \overset{\cdot}{V} = Y \overset{\cdot}{V} \\
Y = \sum_{i = 1}^N Y_k
$$
相量域,电阻和电抗,电导和电纳具有完全相同的地位。
RC 分压的相量法分析
功率分析
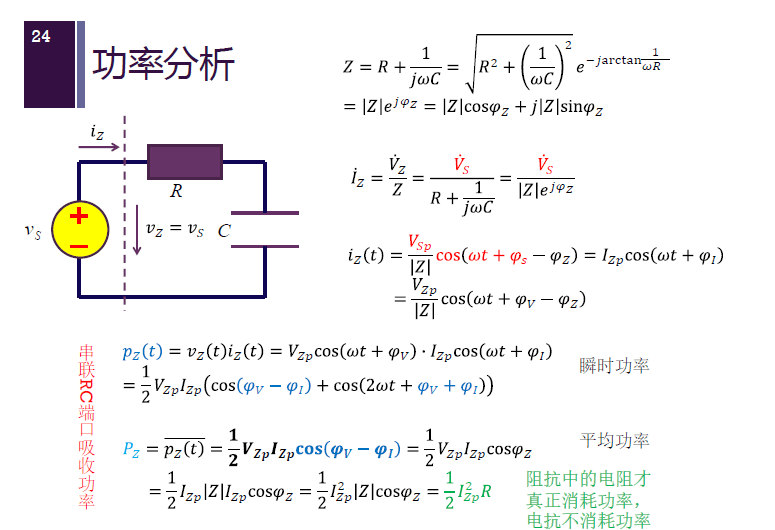
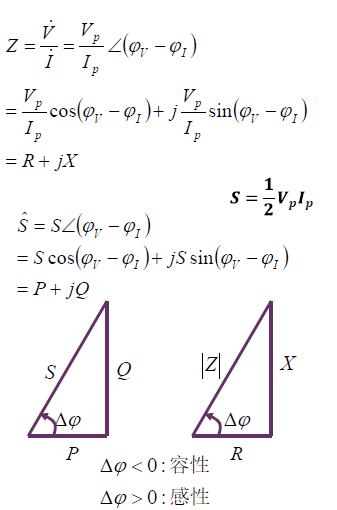
复功率
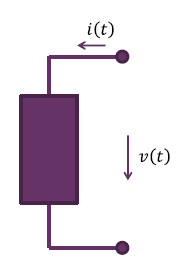
假设某负载(单端口网络)的端口电压电流为如图所示的关联参考方向,定义该负载吸收的复功率为:
$$
\hat{S} = \frac{1}{2} \overset{\cdot}{V} \overset{\cdot}{I}^* \\
= \frac{1}{2} (V_p \angle \varphi_V) (I_p \angle -\varphi_I) \\
= \frac{1}{2} V_p I_p \angle (\varphi_V – \varphi_I) = S \cdot e^{\mathrm{j}(\varphi_V – \varphi_I)} \\
= P + \mathrm{j} Q
$$
实功,有功功率($W$,瓦),虚功,无功功率($\mathrm{var}$,乏)。
阻抗、功率三角形
实功就是负载真正消耗的功率,虚功就是来回反射的功率。
$S = I_{rms}^2 |Z|$ 就是负载看上去消耗的功率。
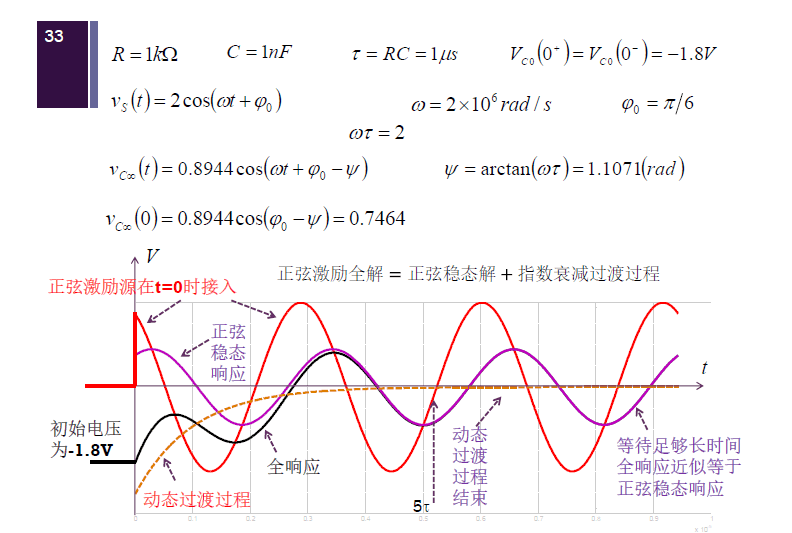
RC 分压:$t = 0$ 加载正弦激励
分析
存在电容初始电压的源等效问题,即存在指数衰减规律的零输入响应。
$t > 0$ 时:
$$
v_S(t) = v_R(t) + v_C(t) \\
= RC \frac{\mathrm{d}}{\mathrm{d} t} v_C(t) + v_C(t) \\
v_S(t) = V_{Sp} \cos (\omega t + \varphi_S)
$$
由于电路中的零输入响应是指数衰减规律的函数,因而电路中是存在非正弦波信号的,不能直接假设电容电波为前述稳态分析中的正弦波电压。

$$
v_C(t) = V_0 e^{-\frac{t}{\tau}} + \int_0^t e^{\frac{\lambda – t}{\tau}} v_S(\lambda) \mathrm{d} \frac{\lambda}{\tau}, t > 0
$$
故:
$$
v_C(t) = \left (V_0 – \int_{-\infty}^0 e^{\frac{\lambda}{\tau}} v_S(\lambda) \mathrm{d} \frac{\lambda}{\tau} \right ) e^{-\frac{t}{\tau}} + \int_{-\infty}^t e^{\frac{\lambda – t}{\tau}} v_S(\lambda) \mathrm{d} \frac{\lambda}{\tau} \\
= (V_0 – v_{C\infty}(0)) e^{-\frac{t}{\tau}} + v_{C\infty}(t)
$$
第一项为瞬态响应,第二项为稳态响应。($t > 0$)
三要素法
- 时间常数 $\tau = RC, \tau = GL$;
- 初值 $X_0, v_C(0) = V_0, i_L(0) = I_0$;
- 终值,稳态响应 $x_{\infty}(t)$。
$$
x_\infty(t) = \left ( \int_{-\infty}^t e^{\frac{\lambda – t}{\tau}} s(\lambda) \mathrm{d} \frac{\lambda}{\tau} \right ) \cdot U(t)
$$
稳态响应如何求:
- 直流激励:电容开路,电感短路即可获得直流激励下的稳态解。
- 正弦波激励:相量法(电容电感分别用导纳和阻抗替代),可获得正弦波激励下的稳态解。
- 方波激励:下讲。
- 其他激励:电路意义难以解释,代入求解,如果求不出就猜:稳态响应形式应当和激励形态相类似,猜后代入原始方程验证确认。
三要素求解
$$
\tau = RC \\
V_{C0} = V_0 \\
v_{C\infty}(t) = \frac{V_{Sp}}{\sqrt{1 + (\omega \tau)^2}} \cos (\omega t + \varphi_S – \arctan(\omega \tau))
$$
(稳态响应通过相量法求得)
因此得到:
$$
v_C(t) = \frac{V_{Sp}}{\sqrt{1 + (\omega \tau)^2}} \cos (\omega t + \varphi_S – \arctan(\omega \tau)) \\
+ (V_0 – \frac{V_{Sp}}{\sqrt{1 + (\omega \tau)^2}} \cos (\varphi_S – \arctan(\omega \tau))) e^{-\frac{t}{\tau}}
$$
($t \ge 0$)
实例计算
戴维南-诺顿定理
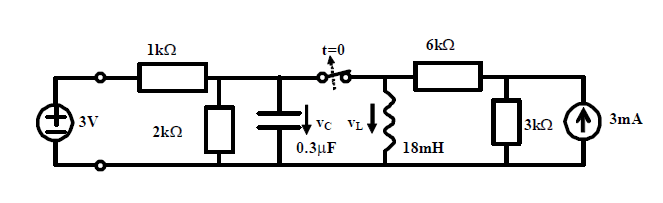
实例
开关在 $t = 0$ 时刻断开。
断开前,电路已经稳定。求开关断开后,电容电压 $v_c(t)$ 和电感电压 $v_L(t)$ 的变化规律。
戴维南定理
一个包含独立电源的单端口线性网络,其端口等效电路可表述为一个恒压源和一个阻抗的串联,源电压为端口开路电压,串联阻抗为线性网络内所有独立电源置零时的端口等效阻抗。
诺顿定理
一个包含独立电源的单端口线性网络,其端口等效电路可表述为一个恒流源和一个阻抗的并联,源电流为端口短路电流,并联阻抗为线性网络内所有独立电源置零时的端口等效电阻。
独立源置零:独立电压源短路,独立电流源开路。
定理证明

应用
对于纯阻、纯容、纯感网络,多在时域应用。
对于阻、容、感混合网络,多在频域(相量域)应用。
由于时频之间是傅里叶变换与逆变换的关系,两者是等同的,有时混用。
分析:开关断开,则为两个一阶动态
$$
v_C(t) = v_{C\infty} + (v_C(0) – v_{C\infty}(0)) e^{-\frac{t}{\tau_C}} \\
i_L(t) = i_{L\infty} + (i_L(0) – i_{L\infty}(0)) e^{-\frac{t}{\tau_L}} \\
v_L(t) = v_{L\infty}(t) + (v_L(0^+) – v_{L\infty}(0^+)) e^{-\frac{t}{\tau_L}}
$$
电感电压不是状态变量,但仍可用三要素法。
但注意电感电压可突变,因而初值为 $0^+$ 时刻初值。
要素 1:初值
开关断开前是直流电路,对直流而言,电容开路,电感短路。
$$
v_C(0^+) = v_C(0^-) = 0 \\
i_L(0^+) = i_L(0^-) = \frac{3V}{1k \Omega} + 3 mA \frac{3k}{3k + 6k} = 4 mA
$$
要素 2:稳态响应
开关打开,等待足够长时间,再次变化为直流电路,对直流而言:电容开路,电感短路。
$$
v_{C\infty} = \frac{2k}{2k + 1k} 3V = 2V \\
i_{L\infty}(t) = 3 mA \frac{3k}{3k + 6k} = 1 mA
$$
要素 3:时间常数
$$
\tau_C = RC = 0.2 ms \\
\tau_L = GL = 2 \mu s
$$
三要素结论
$$
v_C(t) = 2\left(1 – e^{-\frac{t}{0.2 \times 10^{-3}}} \right) V \\
i_L(t) = \left(1 + 3e^{-\frac{t}{2 \times 10^{-6}}} \right) mA \\
(t \ge 0)
$$
所以综上所述:
$$
v_C(t) =
\begin{cases}
0 & t < 0 \\
2\left(1 - e^{-\frac{t}{0.2 \times 10^{-3}}} \right) V & t \ge 0
\end{cases} \\
i_L(t) =
\begin{cases}
4 mA & t < 0 \\
\left(1 + 3e^{-\frac{t}{2 \times 10^{-6}}} \right) mA & t \ge 0
\end{cases} \\
v_L(t) = L \frac{\mathrm{d} i_L(t)}{\mathrm{d} t} =
\begin{cases}
0 & t < 0 \\
-27 e^{-\frac{t}{2 \times 10^{-6}}} V & t \ge 0
\end{cases}
$$
电感电压也可通过三要素表述:
$$
v_L(0^-) = 0 \\
v_L(0^+) = (-1m \times 3k - 4m \times 6k) V = 27 V \\
v_{L\infty}(t) = 0 \\
\tau_L = GL = 2 \mu s
$$


No Comments